

Accueil > Thèmes de recherche > Observation adaptative > Des outils numériques objectifs
Les techniques numériques servent à obtenir une information objective issue des modèles.
Il existe 2 grandes familles de techniques et deux générations de techniques.
Deux générations :
On distingue les deux générations par la capacité à tenir compte non seulement de la dynamique atmosphérique, mais aussi des observations futures dites de routine et contemporaines des observations à déployer.
Ainsi les techniques de première génération donnent une information sur où des modifications, mêmes minimes, des conditions initiales du modèle (analyse) auront le plus fort impact sur la vérification.
Les techniques de seconde génération font une estimation de réduction de variance d’erreur de prévision sur la vérification pour une simulation d’observations additionnelles. Elle peuvent aussi donner une information moins pointue sous la forme du besoin en observation supplémentaires pour une meilleure prévision du phénomène à vérifier.
La famille des techniques de l’adjoint.
Les techniques de l’adjoint utilisent l’adjoint de la version linéaire tangente du modèle de prévision (1ere et 2nde génération) ainsi qu’une estimation de l’adjoint du système d’assimilation (pour la seconde génération).
Dans cette famille on compte ainsi les techniques suivantes : sensibilité de la prévision aux conditions initiales (1), vecteurs singuliers énergie-énergie (1), vecteurs singuliers de la Hessienne (2), HRRE (Hessian Reduced Rank Estimate, 2), KFS (Kalman Filter Sensitivity, 2).
La famille des techniques ensemblistes.
Les techniques de cette famille utilisent les propriétés des ensembles de prévisions pour faire des estimations de variance des erreurs de prévision et d’analyses. Par ailleurs, les ensembles de dimension modeste permettent de définir des sous-espaces dans lesquels il est confortable de calculer les réductions de variance dues à l’ajout d’observations simulées. Hors coût de l’ensemble, ces techniques sont en général moins coûteuses que les techniques d’adjoint.
La technique la plus connue est l’ETKF (Ensemble Transform Kalman Filter, 2).
Les challenges :
Les techniques les plus avancées tiennent compte de la dynamique atmosphérique, des observations futures, des algorithmes d’assimilation et de l’incertitude sur les prévisions. On se situe aux frontières du savoir faire en matière de prévision numérique du temps. Par ailleurs, ces techniques se doivent de faire une prévision a priori de la couverture des observations dites de routine qui sont attendues à l’instant de déploiement des observations supplémentaires. La localisation et la qualité de ces observations sont les 2 caractères primordiaux à prévoir. Mais pour une grande partie des observations aujourd’hui assimilées dans les modèles de PNT , la localisation dépend de critère parfois peu prévisibles : position des nuages (données satellites infrarouge, vents dérivés du déplacement des nuages), ou encore choix des routes aériennes (données des avions commerciaux).
Cette question de la prévision du réseau d’observation se pose aussi pour tout l’intervalle de temps entre maintenant (jour des calculs et de prise de décision, t_ana sur la figure du 1) et l’instant de déploiement des observations (t_obs). Toute l’information apportée au système de PNT par les observations de routine durant le lead-time est pour l’instant laissée de côté.
Nos outils :
Au CNRM (Météo France), plusieurs techniques sont, soit disponibles, soit en cours de développement.
La KFS :
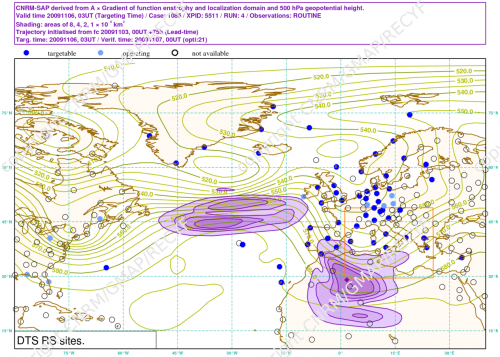
- Carte de "besoin en observation" dérivé d’un calcul de KFS.
- L’énergie totale du champ 3D est ici intégré sur la verticale afin de crée une zone sensible 2D apparaissant en plages violettes.
Carte de "besoin en observation" dérivé d’un calcul de KFS .
L’énergie totale du champ 3D est ici intégré sur la verticale afin de crée une zone sensible 2D apparaissant en plages violettes. Ce cas de ciblage est issu de l’expérience DTS -MEDEX 2009 (cas 1085). Les contours représentent la Z500 prévue à l’instant d’observation (tobs). La zone délimitée en orange montre la région de vérification définie 18heures plus tard (tvf). Les points, donnés ici à titre indicatif, montrent les sites de radiosondage et leur capacité à être éventuellement déclenchés (voir légende).
La sensibilité aux conditions initiales :
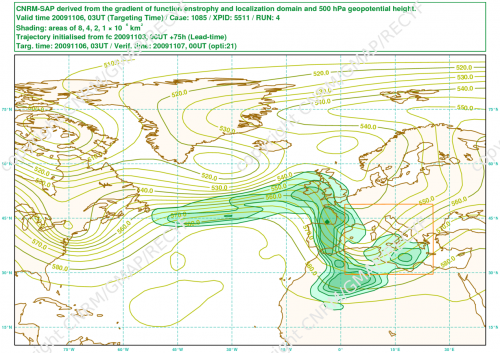
- Carte de sensibilité de la prévision aux conditions initiales
- L’énergie totale du champ 3D de sensibilité aux conditions initiales est ici intégré sur la verticale afin de crée une zone sensible 2D apparaissant en plages vertes.
Carte de sensibilité de la prévision aux conditions initiales
L’énergie totale du champ 3D de sensibilité aux conditions initiales est ici intégré sur la verticale afin de crée une zone sensible 2D apparaissant en plages vertes. Ce cas de ciblage est issu de l’expérience DTS -MEDEX 2009 (cas 1085). Les contours représentent la Z500 prévue à l’instant d’observation (tobs). La zone délimitée en orange montre la région de vérification défini 18heures plus tard (tvf).
L’ETKF
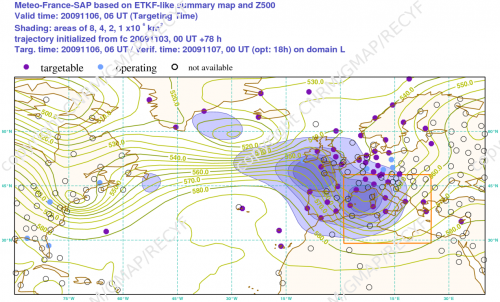
- Carte composite issue d’un calcul de l’ETKF sur le même cas de ciblage
- Le champ issu de l’ETKF donne en chaque point la réduction de variance d’erreur de prévision estimée pour l’ajout d’un éventuel paquet d’observations déployé en ce point.
Carte composite issue d’un calcul de l’ETKF sur le même cas de ciblage.
Le champ issu de l’ETKF donne en chaque point la réduction de variance d’erreur de prévision estimée pour l’ajout d’un éventuel paquet d’observations déployé en ce point. Les contours représentent la Z500 prévue à l’instant d’observation (tobs). La zone délimitée en orange montre la région de vérification définie 18heures plus tard (tvf). Les points, donnés ici à titre indicatif, montrent les sites de radiosondage et leur capacité à être éventuellement déclenchés (voir légende).
Références :
Bishop C.H., B. J. Etherton and S.J. Majumdar, 2001. Adaptive sampling with the ensemble transform Kalman filter. Part I : theoretical aspects. Monthly Weather Review, 129, 420—436.
Majumdar S.J., C.H. Bishop, B.J. Etherton and Z. Toth, 2001. Adaptive sampling with the Ensemble Transform Kalman Filter. Part II : Field program implementation. Monthly Weather Review, 130, 1356—1369.
Leutbecher M., 2003. A reduced rank estimate of forecast error changes due to intermittent modifications of the observing network. Journal of Atmospheric Sciences, 60 (5), 729—742.
Bergot T. and A. Doerenbecher, 2002. A study on the optimization of the deployment of targeted observations using adjoint-based methods.
Quarterly Journal of Royal Meteorological Society, 128, 1689—1712.
|